What NVD Does
Currently, any company that wants to send a drone across a city runs into many problems, including obstacle avoidance, adherence to local and national laws, long distance monitoring, and expensive pilots. By connecting drones to the internet, Nevada Dynamics provides the technology infrastructure to integrate existing drone systems into a safe, commercial environment, where drones can be sent anywhere with the click of a button or swipe of a finger, and data can be immediately uploaded and visualized. NVD got started in a garage with some students just over a year ago, and we have made some incredible progress towards making this vision a reality.
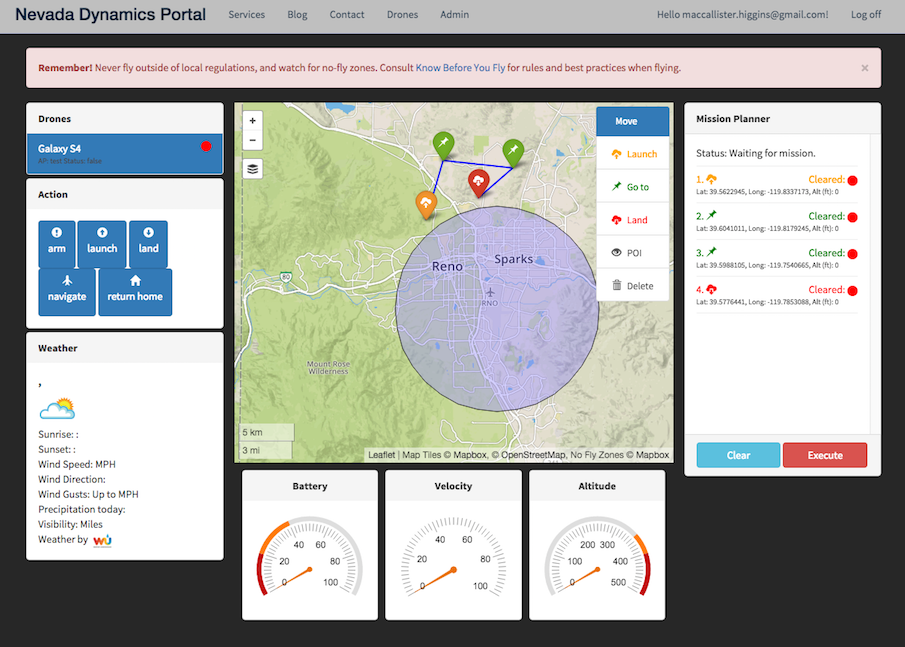
The NVD system can be installed on a drone using an onboard Android cell phone (with our Totem app) or small Linux computer (running Totem software), connecting to the internet through a Drone Data Plan that we provide though strategic partnerships with cellular carriers, and operating with low-latency, encrypted, lightweight messages. If you check out the picture at the top of this page, you can just barely see the profile of an Android phone mounted on the bottom of the 3DR Iris, running our current app. The control client can then be run from any web browser, mobile or desktop. This enables drones to be sent anywhere to film anything, deliver any package, monitor any security perimeter, or anything else imaginable. As a bonus, we are also supporting real-time video streaming straight from the drone over cellular networks.
The cloud connectivity; however, is simply a means to an end, as we enable the drones themselves to create custom flight plans that avoid buildings, other aircraft, and no-fly zones, while integrating with the national Unmanned Traffic Management system currently being developed by NASA and the FAA. Nevada Dynamics believes that controlling drones should be simple and intuitive, not complicated and filled with regulatory compliance training.
Drones are currently mostly used for filming, and producing professional drone footage requires professional drone operators that can cost over 15k a day. For small, independent filmakers, this is not an option. Using the 3D database that we are developing and expanding with every drone flight on our system, planning cinematic shots will soon be as easy as point-and-click. NVD is currently testing our 3D visualization engine, which will allow our users to plan paths visually in 3D space, setting up shots like a true director. The coolest part? This feature will hook right into commercial VR headsets and Android applications, leading to a truly immersive experience that puts you right behind the camera. This feature will be rolled into our beta, which officially launches February 20th.
By moving the common "ground control station" to the cloud, Nevada Dynamics has eliminated complexity and enabled any company to navigate this new market and use drones to their maximum potential, in the absolute easiest way possible by directly using our web control station, contracting with us to build specific drone applications, or by taking advantage of our open API and building on top of our system. This platform can move in many different directions, and we look forward to adding to our list of collaborators, which currently includes universities, large international and domestic drone and autopilot manufacturers, UAS-service based companies, and national cellular networks.
Want to hear about Nevada Dynamics from someone besides us?
- Check out this TV spot about NVD winning the largest collegiate entrepreneurship competition in the country
- Here's a great article from the University of Nevada
- A quick spot on Interdrone, the largest drone conference in the world, where NVD took home the designation of one of top 10 coolest companies by Flystro
- An AOPA article that features an interview with MacCallister (our CEO) and NVD
What NVD can do with Tango
Our vision extends beyond just enabling filming for the average consumer or easy drone integration into businesses. Our development timeline includes layering real-time video over our 3D terrain database, and visualizing that over the browser for our users. This, paired with our path planning, would allow one operator to monitor a large area with several drones, with no need for pilots or multiple people viewing multiple video streams. This, based on our customer interviews, would enable a large subset of use cases of drones to finally become a scalable reality. By removing all the technical barriers to entry, NVD wants to truly unlock the potential of drones and enable the future of things that fly.
These long term goals of NVD require a few more things, namely some advanced localization, accurate pose estimation, and real-time close range modeling. Sound familiar? We purchased the Tango dev kit the day we were invited into the beta, and have been exploring its potential ever since. We would love to work directly with Google in using Tango, onboard our aircraft, to utilize SLAM to figure out where we are, and more importantly, what we are looking at. The sensor fusion possibilities are also incredibly intriguing to our team, and bringing in GPS to the current IMU/Visual odometry pairing could prove to produce some amazing results, right on the Android device. For any drone to operate in an urban environment with buildings, people, and other generally unknown obstacles, we need to take in all of the information we can get.
We initially chose to launch our initial product using an Android application for a few key reasons: Small footprint, built-in cellular radio, and an OS with battery life and security considerations baked in. For these same reasons, we would love to stick with Android as we move beyond a priori command and control, and into the domain of real-time sensing and localization. The Android OS has already allowed us to do so much with such a small team, and we want to continue utilizing all of these benefits as we move beyone our beta into the next level of navigation. We've been impressed with what we have been able to do with the Tango device so far, and a partnership in the app incubator would give us not only the resources to augment our current application, but demonstrate much needed industry support as we move ahead in our business and technical development timeline.
Our Team
The NVD team is made up of individuals from a diverse set of backgrounds. Our development team includes skillsets that range from Android developers to AI researchers, and this range is truly reflected in our mission as a company. Nevada Dynamics has set out to bring high-end robotics tech to consumer level devices, and these are the people who are helping us do that.
Management
MacCallister Higgins - CEO
MacCallister Higgins is the CEO and lead software developer at Nevada Dynamics, software engineer at a nameless defense contractor, and recently graduated student researcher from the department of Computer Science and Engineering at the University of Nevada, Reno. He performed research in the field of Human-Robot Interaction, as well as the large-scale control of Unmanned Autonomous Systems for the UNR Robotics group, including failure contingencies and safety systems. He also worked at the Polymer Microsystems (PlUS) Lab under Dr. Geiger from early 2011 to 2014, developing lab technologies and assisting in several key, funded projects alongside PhD, masters, and undergraduate students. This position had him developing control system circuit board hardware, writing the software for those embedded systems, implementing radio mesh networks for NASA, and writing published journal papers.
Currently, he works full time at a defense contractor, developing next-generation environmental and physical awareness technologies for both fixed wing and rotor aircraft. As the CEO of Nevada Dynamics, he is also focused on leading a startup company that aims to enable the widespread, commercial use of drones. Technology wise, this involves everything from writing Android apps, designing embedded C programs for things that fly, and architecting large-scale cloud infrastructures that process real-time, spatial data.
Erik Edgington - President
Erik P. Edgington studied Mechanical Engineering with a minor in Entrepreneurship at the University of Nevada. His experience encompasses a wide range of topics including project management, 3D modeling and printing, and financial modeling and projections. Erik’s experience in leading both technical and non-technical teams helps guide Nevada Dynamics’ future and bridge the gap between technical development and the business development side of the company.
Nolan Young - CFO
Nolan E. Young is a staff accountant at a local firm which specializes in tax services with extensive experience in company financials. He graduated the University of Nevada, Reno in December 2015. Nolan is the primary contact for all Nevada Dynamics financials.
Trevor York - CMO
Trevor York studied marketing at the University of Nevada, Reno and has a passion for adding the creative flair to a project. He runs a production company and is currently the director of sales for a casino gaming company. Filling the role of the romantic on the team, he enjoys long moonlit walks on the beach in his free time.
Engineering Team
Thomas (Taylor) Mansfield - Lead Engineer
Thomas “Taylor” Mansfield is a recent graduate from the University of Nevada, Reno with a B.S. in Computer Science and Engineering. Taylor has a natural entrepreneur spirit with prior experience as a Software Engineer at another local startup, Load IQ. His level of thoroughness and high testing standards provide the ultimate gauntlet for all of our software to ensure they are of the highest of quality.
David Frank - Lead Researcher
David Frank is currently pursuing his M.S. in Computer Science and Engineering at the University of Nevada, Reno with a relentless focus on research and artificial intelligence. His research expertise and prior experience at NASA is essential to the Nevada Dynamics’ team and the success of our distributed path planning system. David’s current research is focused on robotic perception with work specifically tied to a location tracking system for UAVs that functions in GPS denied areas.
Frank Mascarich - Embedded Systems Intern
Frank Mascarich graduated with a degree in Political Science in 2012, and then decided to turn his computer hobby into a degree in Computer Engineering which he expects to finish in May of 2016. Frank has industry experience working as a consultant and software developer, where he performed embedded systems engineering. During his time in consulting, Frank played a key role in bringing several products to the market. Frank's other computer science areas of focus include networking, real-time systems, and assembly programming in highly resource-constrained environments.
Borzuyeh (Peter) Rahmanifar - Web Development Intern
Borzuyeh Rahmanifar recived a B.S. degree from the University of Nevada, Reno in 2009 and is in his final semester of schooling for a B.S. in Computer Science and Engineering. Borzuyeh is passionate about computer science and has experience programming in Java, C++, and C. He is currently developing the distributed backend databases that hold all of the terrain data the drones on our system need to avoid obstacles.
Business Development
Robert Jones - Growth Hacker
A Senior Neuroscience major with experience in IT, social media marketing, and web analytics. Robert is a young professional enamored with the quick pace and environment of startup culture, bringing a scientific background that fits perfectly into A/B testing and growth hacking. At Nevada Dynamics Robert has successfully submitted a S333 exemption, and taken over our company social media accounts. He works on growing the social media following in preparation of product launch.
Mitch Warden - Business Analyst
Mitch Warden is a mechanical engineering major at the University of Nevada Reno. He joined the Nevada Dynamics team this last year, and contributes an assortment of skills and experience to the team. Mitch has a wide variety of responsibilities ranging from hands on technical building to day to day business duties at Nevada Dynamics. He also assumes a research analyst position, and is in charge of numerous research projects. He prides himself on being a very versatile and dedicated member of the team, and will take on any responsibilities necessary for the overall success of the team as a whole.
Student Involvement
Alex Ward - Student Project Role
Alex Ward is currently a senior at the University of Nevada, Reno. He is majoring in Computer Science and Engineering and minoring in Mathematics. He is very familiar developing applications in Java for Android devices and has even worked with other companies to develop applications for their specific needs. He has created and published dozens of personal Android applications through the Google Play store and Amazon Marketplace. Apps developed range from universal Xbox Media Remotes (averaging 1500 downloads a day), secure texting apps, and applications that enable remote phone access. Apart from Android development, he enjoys working with LAMP stacks and server side code as well.
Jeffrey Bouchard - Student Project Role
Jeffrey Bouchard is a senior pursuing a B.S. in Computer Science and Engineering with a minor in Mathematics. He has experience programming in C++, Visual Basic, SQL, Java, and Python. He has industry experience with SQL and developing databases.
Dat Luu - Student Project Role
Dat Luu is a senior at the University of Nevada pursing a degree in Computer Science and Engineering. Dat’s primary programming language is HTML5 but he also has experience with C/C++ in robotics projects.
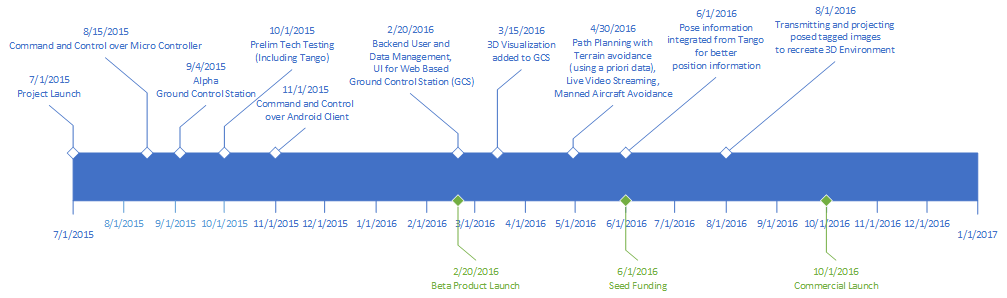
Our Timeline
NVD is currently making final preparations for our beta launch at the end of February. Other dates can be found in the graphic below.